ROS actionlib
Table of Contents
1. actionlib 简介
我们知道 ROS 中的 Services 是同步的,适应于一些耗时很少的操作,如查询状态信息,对设备进行配置等。对于耗时的操作(如移动到某个位置),ROS 中 Actions 更加合适(Actions 的实现以 Topics 为基础)。
The actionlib package provides tools to create servers that execute long-running goals that can be preempted. It also provides a client interface in order to send requests to the server.
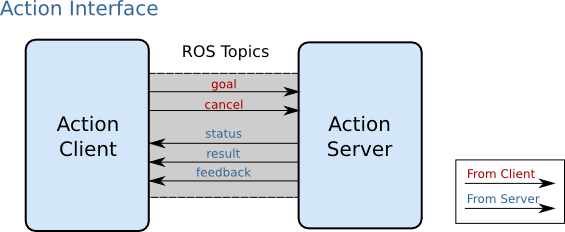
Figure 1: Action 接口
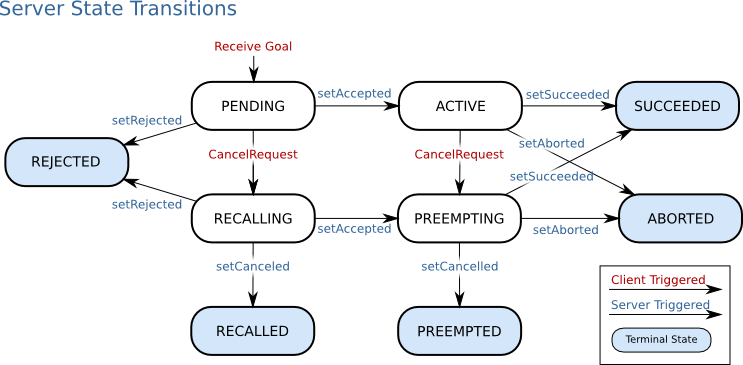
Figure 2: Action 服务端的状态转移图
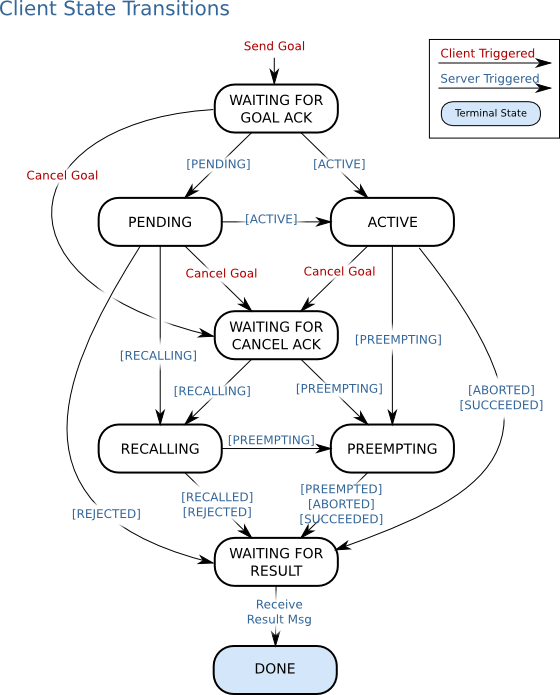
Figure 3: Action 客户端的状态转移图
2. Actions 实例
下面例子摘自:http://wiki.ros.org/actionlib/Tutorials
这个实例的场景为:
This tutorial covers using the simple_action_server library to create a Fibonacci action server. This example action server generates a Fibonacci sequence, the goal is the order of the sequence, the feedback is the sequence as it is computed, and the result is the final sequence.
后面将介绍 Goal, Feedback, Result 这三个概念。
2.1. 准备工作:创建工作区和功能包
创建和编译 workspace:
$ source /opt/ros/indigo/setup.bash $ mkdir -p ~/catkin_ws/src $ cd ~/catkin_ws/src $ catkin_init_workspace $ cd ~/catkin_ws/ $ catkin_make
创建功能包 learning_actionlib 和子目录 action:
$ source devel/setup.bash $ cd ~/catkin_ws/src $ catkin_create_pkg learning_actionlib actionlib message_generation roscpp rospy std_msgs actionlib_msgs $ mkdir action
2.2. 创建和编译 action 定义文件
Action 由一个.action 文件来定义,它包含三个部分:Goal, Feedback, Result,各个部分之间用“---”分隔。
2.2.1. Goal, Feedback, Result
- Goal
- To accomplish tasks using actions, we introduce the notion of a goal that can be sent to an ActionServer by an ActionClient. In the case of moving the base, the goal would be a PoseStamped message that contains information about where the robot should move to in the world. For controlling the tilting laser scanner, the goal would contain the scan parameters (min angle, max angle, speed, etc).
- Feedback
- Feedback provides server implementers a way to tell an ActionClient about the incremental progress of a goal. For moving the base, this might be the robot's current pose along the path. For controlling the tilting laser scanner, this might be the time left until the scan completes.
- Result
- A result is sent from the ActionServer to the ActionClient upon completion of the goal. This is different than feedback, since it is sent exactly once. This is extremely useful when the purpose of the action is to provide some sort of information. For move base, the result isn't very important, but it might contain the final pose of the robot. For controlling the tilting laser scanner, the result might contain a point cloud generated from the requested scan.
2.2.2. Fibonacci.action
创建文件 action/Fibonacci.action,内容如下:
#goal definition int32 order --- #result definition int32[] sequence --- #feedback int32[] sequence
如果 CMakeList.txt 中没有下面内容,则增加它:
add_action_files( DIRECTORY action FILES Fibonacci.action ) generate_messages( DEPENDENCIES actionlib_msgs std_msgs ) catkin_package( CATKIN_DEPENDS actionlib_msgs )
2.2.3. 编译生成 msg 文件和头文件
进入到工作区根目录,用 catkin_make 进行编译。如:
$ cd ~/catkin_ws/ $ catkin_make
编译成功后,会由.action 文件生成对应的.msg 文件,再由.msg 文件生成对应的头文件。如:
$ ls devel/share/learning_actionlib/msg/ FibonacciActionFeedback.msg FibonacciActionResult.msg FibonacciResult.msg FibonacciActionGoal.msg FibonacciFeedback.msg FibonacciAction.msg FibonacciGoal.msg $ ls devel/include/learning_actionlib/ FibonacciActionFeedback.h FibonacciActionResult.h FibonacciResult.h FibonacciActionGoal.h FibonacciFeedback.h FibonacciAction.h FibonacciGoal.h
2.3. 准备 server 节点的代码
创建文件 learning_actionlib/src/fibonacci_server.cpp,其内容如下:
#include <ros/ros.h>
#include <actionlib/server/simple_action_server.h> /* 由actionlib提供的头文件 */
#include <learning_actionlib/FibonacciAction.h> /* 由.action文件编译生成的头文件 */
class FibonacciAction
{
protected:
ros::NodeHandle nh_;
// NodeHandle instance must be created before this line. Otherwise strange error may occur.
actionlib::SimpleActionServer<learning_actionlib::FibonacciAction> as_;
std::string action_name_;
// create messages that are used to published feedback/result
learning_actionlib::FibonacciFeedback feedback_;
learning_actionlib::FibonacciResult result_;
public:
FibonacciAction(std::string name) :
as_(nh_, name, boost::bind(&FibonacciAction::executeCB, this, _1), false),
action_name_(name)
{
as_.start();
}
~FibonacciAction(void)
{
}
void executeCB(const learning_actionlib::FibonacciGoalConstPtr &goal)
{
// helper variables
ros::Rate r(1);
bool success = true;
// push_back the seeds for the fibonacci sequence
feedback_.sequence.clear();
feedback_.sequence.push_back(0);
feedback_.sequence.push_back(1);
// publish info to the console for the user
ROS_INFO("%s: Executing, creating fibonacci sequence of order %i with seeds %i, %i", action_name_.c_str(), goal->order, feedback_.sequence[0], feedback_.sequence[1]);
// start executing the action
for(int i=1; i<=goal->order; i++)
{
// check that preempt has not been requested by the client
if (as_.isPreemptRequested() || !ros::ok())
{
ROS_INFO("%s: Preempted", action_name_.c_str());
// set the action state to preempted
as_.setPreempted();
success = false;
break;
}
feedback_.sequence.push_back(feedback_.sequence[i] + feedback_.sequence[i-1]);
// publish the feedback
as_.publishFeedback(feedback_);
// this sleep is not necessary, the sequence is computed at 1 Hz for demonstration purposes
r.sleep();
}
if(success)
{
result_.sequence = feedback_.sequence;
ROS_INFO("%s: Succeeded", action_name_.c_str());
// set the action state to succeeded
as_.setSucceeded(result_);
}
}
};
int main(int argc, char** argv)
{
ros::init(argc, argv, "fibonacci");
FibonacciAction fibonacci(ros::this_node::getName());
ros::spin();
return 0;
}
2.4. 编译并测试 server 节点
在功能包根目录的 CMakefile.txt 中,增加下面内容;
add_executable(fibonacci_server src/fibonacci_server.cpp)
target_link_libraries(
fibonacci_server
${catkin_LIBRARIES}
)
add_dependencies(
fibonacci_server
${learning_actionlib_EXPORTED_TARGETS}
)
进入到工作区根目录,用 catkin_make 进行编译。如:
$ cd ~/catkin_ws/ $ catkin_make
编译正常结束后,会生成对应的可执行程序"/home/cig01/catkin_ws/devel/lib/learning_actionlib/fibonacci_server"。
运行 roscore 和 server 节点。如:
$ roscore & $ . ./devel/setup.bash $ rosrun learning_actionlib fibonacci_server
打开另外一个终端,用 rostopic list -v 检查对应的 Topics 是不是正常地启动了。如:
$ rostopic list -v Published topics: * /fibonacci/feedback [learning_actionlib/FibonacciActionFeedback] 1 publisher * /fibonacci/status [actionlib_msgs/GoalStatusArray] 1 publisher * /rosout [rosgraph_msgs/Log] 1 publisher * /fibonacci/result [learning_actionlib/FibonacciActionResult] 1 publisher * /rosout_agg [rosgraph_msgs/Log] 1 publisher Subscribed topics: * /fibonacci/goal [learning_actionlib/FibonacciActionGoal] 1 subscriber * /fibonacci/cancel [actionlib_msgs/GoalID] 1 subscriber * /rosout [rosgraph_msgs/Log] 1 subscriber
用 rqt_graph 可以看到相应的 Nodes 和 Topics。如:
Figure 4: rqt_graph 查看 action server
说明:上图中 Topic "/statistics"和 Node "/rqt_gui_py_node_3730"是由 rqt_graph 启动的。
测试结束后,在启动 server 节点的终端中按 Ctrl+C 暂时结束 server 节点,下面将演示创建一个 client 节点。
2.5. 准备 client 节点的代码
创建文件 learning_actionlib/src/fibonacci_client.cpp,其内容如下:
#include <ros/ros.h>
#include <actionlib/client/simple_action_client.h>
#include <actionlib/client/terminal_state.h>
#include <learning_actionlib/FibonacciAction.h>
int main (int argc, char **argv)
{
ros::init(argc, argv, "test_fibonacci");
// create the action client
// true causes the client to spin its own thread
actionlib::SimpleActionClient<learning_actionlib::FibonacciAction> ac("fibonacci", true);
ROS_INFO("Waiting for action server to start.");
// wait for the action server to start
ac.waitForServer(); //will wait for infinite time
ROS_INFO("Action server started, sending goal.");
// send a goal to the action
learning_actionlib::FibonacciGoal goal;
goal.order = 20;
ac.sendGoal(goal);
//wait for the action to return
bool finished_before_timeout = ac.waitForResult(ros::Duration(30.0));
if (finished_before_timeout)
{
actionlib::SimpleClientGoalState state = ac.getState();
ROS_INFO("Action finished: %s",state.toString().c_str());
}
else
ROS_INFO("Action did not finish before the time out.");
//exit
return 0;
}
2.5.1. 编译 client 节点
在功能包根目录的 CMakefile.txt 中,增加下面内容;
add_executable(fibonacci_client src/fibonacci_client.cpp)
target_link_libraries(
fibonacci_client
${catkin_LIBRARIES}
)
add_dependencies(
fibonacci_client
${learning_actionlib_EXPORTED_TARGETS}
)
进入到工作区根目录,用 catkin_make 进行编译。如:
$ cd ~/catkin_ws/ $ catkin_make
编译正常结束后,会生成对应的可执行程序"/home/cig01/catkin_ws/devel/lib/learning_actionlib/fibonacci_client"。
2.6. 测试 server 和 client
启动 server 节点,在另一终端中启动 client 节点。如:
$ . ./devel/setup.bash $ rosrun learning_actionlib fibonacci_server [ INFO] [1430885667.685616856]: /fibonacci: Executing, creating fibonacci sequence of order 20 with seeds 0, 1 [ INFO] [1430885687.685983763]: /fibonacci: Succeeded
$ . ./devel/setup.bash $ rosrun learning_actionlib fibonacci_client [ INFO] [1430885667.475625124]: Waiting for action server to start. [ INFO] [1430885667.684697617]: Action server started, sending goal. [ INFO] [14303885687.686609898]: Action finished: SUCCEEDED
当 client 节点还没有结束时,运行 rqt_graph ,查看 Nodes 和 Topics。结果类似于下面:
Figure 5: rqt_graph 查看 action server/client
如果在启动 client 节点前先运行 rostopic echo /fibonacci/result ,则在 client 运行结束后,会得到下面输出:
$ . ./devel/setup.bash
$ rostopic echo /fibonacci/result
header:
seq: 2
stamp:
secs: 1430887629
nsecs: 956256438
frame_id: ''
status:
goal_id:
stamp:
secs: 1430887609
nsecs: 955739472
id: /test_fibonacci-1-1430887609.955739472
status: 3
text: ''
result:
sequence: [0, 1, 1, 2, 3, 5, 8, 13, 21, 34, 55, 89, 144, 233, 377, 610, 987, 1597, 2584, 4181, 6765, 10946]
---
如果在启动 client 节点前先运行 rostopic echo /fibonacci/feedback ,则在 client 运行结束后,会得到类似于下面输出:
$ . ./devel/setup.bash
$ rostopic echo /fibonacci/feedback
header:
seq: 60
stamp:
secs: 1430888155
nsecs: 804780373
frame_id: ''
status:
goal_id:
stamp:
secs: 1430888155
nsecs: 804482578
id: /test_fibonacci-1-1430888155.804482578
status: 1
text: This goal has been accepted by the simple action server
feedback:
sequence: [0, 1, 1]
---
header:
seq: 61
stamp:
secs: 1430888156
nsecs: 804956818
frame_id: ''
status:
goal_id:
stamp:
secs: 1430888155
nsecs: 804482578
id: /test_fibonacci-1-1430888155.804482578
status: 1
text: This goal has been accepted by the simple action server
feedback:
sequence: [0, 1, 1, 2]
---
......
header:
seq: 79
stamp:
secs: 1430888174
nsecs: 805142443
frame_id: ''
status:
goal_id:
stamp:
secs: 1430888155
nsecs: 804482578
id: /test_fibonacci-1-1430888155.804482578
status: 1
text: This goal has been accepted by the simple action server
feedback:
sequence: [0, 1, 1, 2, 3, 5, 8, 13, 21, 34, 55, 89, 144, 233, 377, 610, 987, 1597, 2584, 4181, 6765, 10946]
---