Wavelet Transform
Table of Contents
1. 小波变换简介
小波变换(小波分析)是一种新兴的数学分支,它是泛函数、Fourier 分析、调和分析、数值分析的最完美的结晶;在应用领域,特别是在信号处理、图像处理、语音处理以及众多非线性科学领域,它被认为是继 Fourier 分析之后的又一有效的时频分析方法。
参考:
“Wavelet Theory: An Elementary Approach with Applications. David K. Ruch, Patrick J. Van Fleet”(强烈推荐该书)
1.1. 什么是小波和母小波
小波(Wavelet)是一组函数,它们是通过母小波(Mother Wavelet)进行“伸缩”和“位移”而得到的。母小波(常用 \(\psi(t)\) 表示)是具有特殊性质的实值函数,函数形式是迅速地振荡衰减,且需要满足积分为零( \(\int_{-\infty}^{\infty} \psi(t) \, \mathrm{d}t =0\) )等条件。 图 1 是母小波的一些例子。小波可以用下面形式表示:
\[\psi_{a,b}(t) = \frac{1}{\sqrt{a}} \psi(\frac{t-b}{a})\]
其中, \(a\) 是缩放因子, \(b\) 是平移参数, \(\psi(t)\) 是母小波。
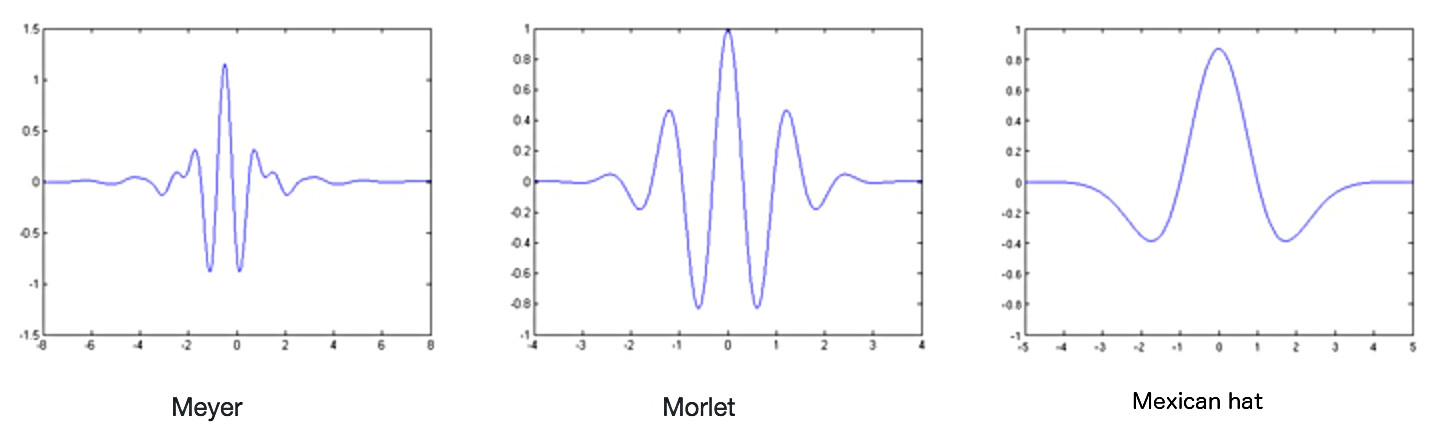
Figure 1: 母小波的一些例子
2. 哈尔小波变换(Haar Wavelet Transform)
哈尔小波变换(Haar wavelet)是最简单的小波变换。
2.1. 哈尔小波级数展开
哈尔小波级数展开为:
\[f(t) = c_{00} \varphi_{00}(t) + \sum_{j=0}^{\infty} \sum_k d_{jk}\psi_{jk}(t)\]
其中,函数 \(\varphi_{00}(t)\) (被称为“尺度函数”)和 \(\psi_{jk}(t)\) (被称为“小波函数”,特别地, \(\psi_{00}(t)\) 是母小波,常记为 \(\psi(t)\) )如图 2 所示。 \(c_{00}\) 和 \(d_{jk}\) 的计算公式分别为:
\[\begin{aligned} & c_{00} = \int_0^1 f(t) \varphi_{00}(t) \, \mathrm{d}t \\
& d_{jk} = \int_0^1 f(t) \psi_{jk}(t) \, \mathrm{d}t \end{aligned}\]
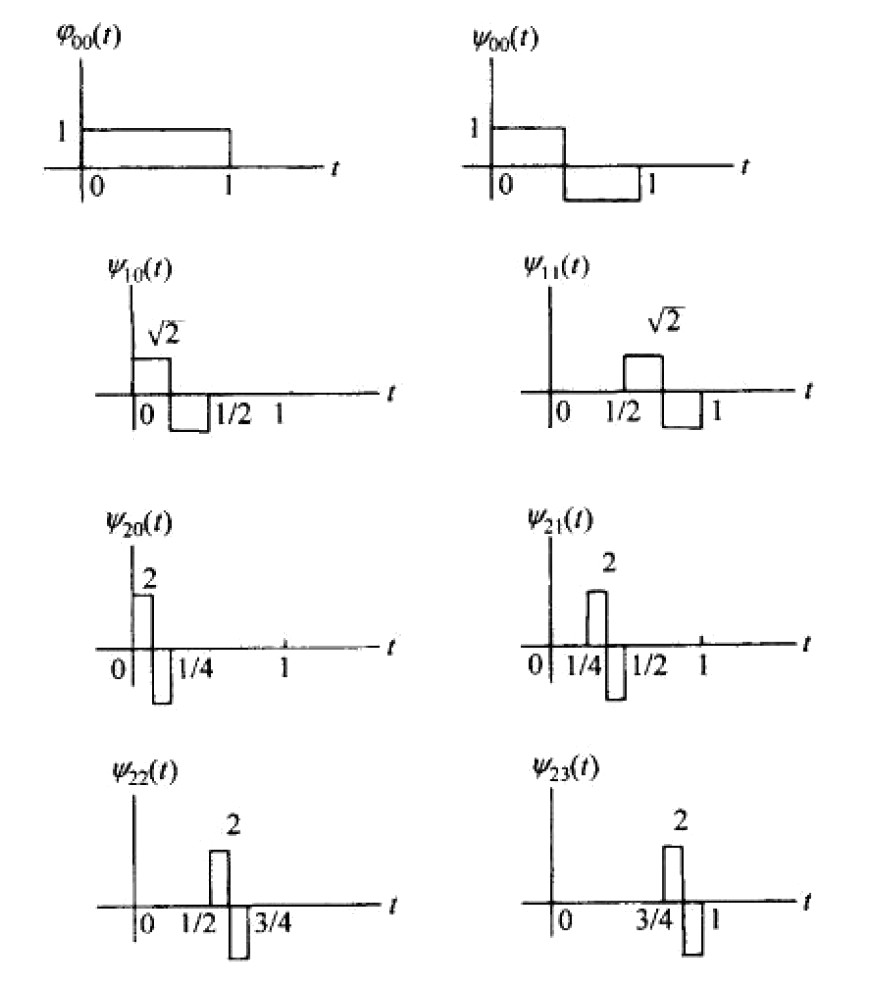
Figure 2: 哈尔尺度函数和第 0 层到第 2 层哈尔小波函数
说明,图 2 中的层数还可以继续增加, 每增加一层,小波个数增加一倍(如第 3 层包含 8 个小波),每个小波的长度是前一层小波长度的一半,具体地,可由 \(\psi_{jk}(t)=2^{j/2}\psi(2^j t -k)\) 来决定其他层的哈尔小波。
参考:《小波基础及应用教程》
2.1.1. 实例:求函数的哈尔小波级数展开
求下面函数的哈尔小波级数展开。
\[f(t) = \begin{cases} t^2, & 0 \le t \le 1 \\ 0, & \text{others} \end{cases}\]
直接利用前面介绍的公式求解。
\[\begin{aligned} & c_{00} = \int_0^1 t^2 \varphi_{00}(t) \, \mathrm{d}t = \int_0^1 t^2 \, \mathrm{d}t = \frac{1}{3} \\
& d_{00} = \int_0^1 t^2 \psi_{00}(t) \, \mathrm{d}t = \int_0^{0.5} t^2 \, \mathrm{d}t - \int_{0.5}^{1} t^2 \, \mathrm{d}t = - \frac{1}{4} \\
& d_{10} = \int_0^1 t^2 \psi_{10}(t) \, \mathrm{d}t = \int_0^{0.25} t^2 \sqrt{2} \, \mathrm{d}t - \int_{0.25}^{0.5} t^2 \sqrt{2} \, \mathrm{d}t = - \frac{\sqrt{2}}{32} \\
& d_{11} = \int_0^1 t^2 \psi_{11}(t) \, \mathrm{d}t = \int_{0.5}^{0.75} t^2 \sqrt{2} \, \mathrm{d}t - \int_{0.75}^{1} t^2 \sqrt{2} \, \mathrm{d}t = - \frac{3 \sqrt{2}}{32} \\
\end{aligned}\]
这里,仅计算了第 0 层和第 1 层,得到了 \(f(t)\) 的近似展开如图 3 所示。
\[f(t) = \frac{1}{3} \varphi_{00}(t) + \left[ - \frac{1}{4} \varphi_{00}(t)\right] + \left[ - \frac{\sqrt{2}}{32} \varphi_{10}(t) - \frac{3 \sqrt{2}}{32} \varphi_{11}(t) \right] + \cdots\]
为了得到更加精确的表示,还可以计算第 2 层、第 3 层,直到 \(\infty\) 层实现精确表示。
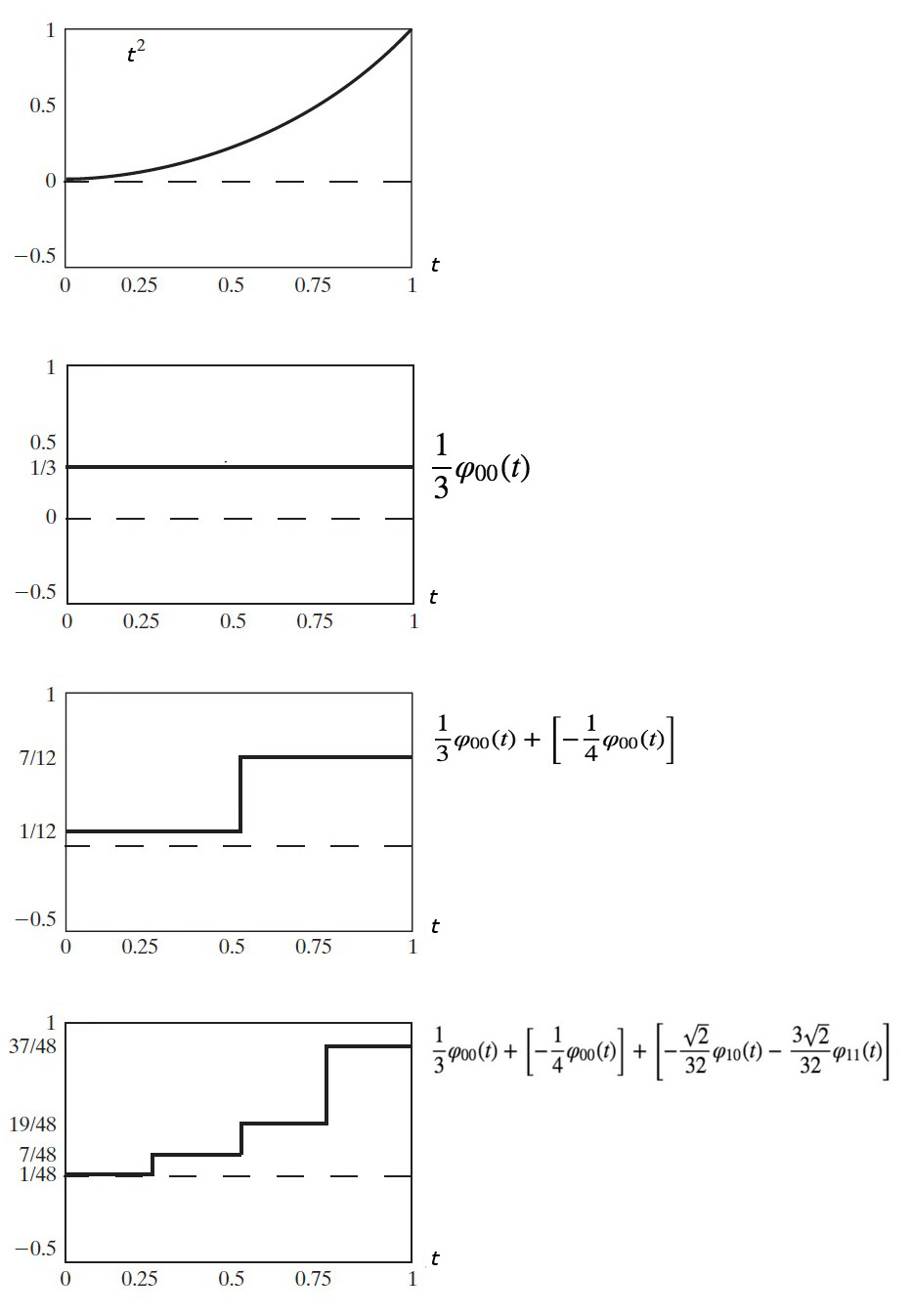
Figure 3: \(f(t)=t^2\) 的哈尔小波级数展开
注:这个例子摘自《数字图像处理(第三版)冈萨雷斯,7.3 一维小波变换》
2.2. 离散哈尔小波变换
2.2.1. 简单例子
小波变换最常用的应用是信号压缩。我们通过一个简单的例子来说明小波变换。
假设你想发送下面信号(8个数字,可以想像为一幅只有 8 个像素的图像)给你的朋友。
[200, 220, 150, 140, 96, 100, 100, 100]
但由于网络非常慢(这仅是一个例子,网络不至于会慢到如此),你只能发送 4 个数字。你会怎么做呢?直观的想法是 对每两个相邻的数字求平均值,只发送这些平均值。 即发送:
[(200+220)/2, (150+140)/2, (96+100)/2, (100+100)/2] = [210, 145, 98, 100]
你朋友收到这 4 个数字后,无法精确地恢复这 8 个数字,但对信号也有个大致的了解。假设你被允许再发送 4 个数字。你又会怎么做呢?这时,可以 发送相邻的数字的差值除以 2(称为细节系统)。 即发送:
[(200-220)/2, (150-140)/2, (96-100)/2, (100-100)/2] = [-10, 5, -2, 0]
这样,你朋友收到这两次数据后,可以完全地恢复你想要发送的原始信号了。
当然,我们还可以接着分解。如表 No description for this link 所示。
| 分辨率 | 平均值 | 细节系数 |
|---|---|---|
| 8 | [200, 220, 150, 140, 96, 100, 100, 100] | |
| 4 | [210, 145, 98, 100] | [-10, 5, -2, 0] |
| 2 | [177.5, 99] | [32.5, -1] |
| 1 | [138.25] | [39.25] |
这就是哈尔小波变换的基本思想。
在上面例子中,哈尔小波变换把 “[200, 220, 150, 140, 96, 100, 100, 100]”转换了“[210, 145, 98, 100, -10, 5, -2, 0]”,这个过程,可以用矩阵来表示。那这个变换矩阵是什么呢?即图 4 中的大问号代表的矩阵会是什么呢?
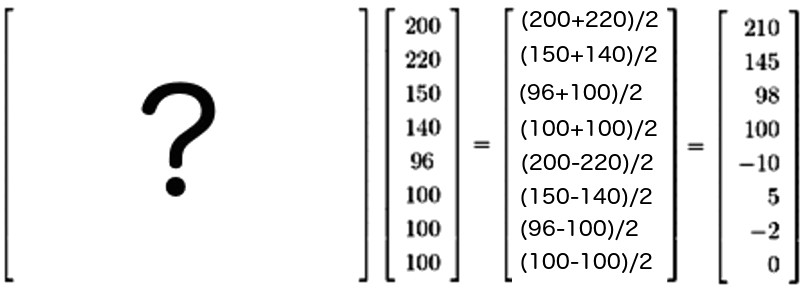
Figure 4: 变换矩阵是什么呢
容易求得大问号代表的哈尔小波变换的“变换矩阵”为下式左边的大矩阵。
\[\left[ \begin{array}{cccccccc}
1/2 & 1/2 & 0 & 0 & 0 & 0 & 0 & 0 \\
0 & 0 & 1/2 & 1/2 & 0 & 0 & 0 & 0 \\
0 & 0 & 0 & 0 & 1/2 & 1/2 & 0 & 0 \\
0 & 0 & 0 & 0 & 0 & 0 & 1/2 & 1/2 \\
\hline
1/2 & -1/2 & 0 & 0 & 0 & 0 & 0 & 0 \\
0 & 0 & 1/2 & -1/2 & 0 & 0 & 0 & 0 \\
0 & 0 & 0 & 0 & 1/2 & -1/2 & 0 & 0 \\
0 & 0 & 0 & 0 & 0 & 0 & 1/2 & -1/2 \\
\end{array} \right] \left[ \begin{array}{c}
200 \\
220 \\
150 \\
140 \\
\hline
96 \\
100 \\
100 \\
100 \end{array} \right]= \left[ \begin{array}{c}
210 \\
145 \\
98 \\
100 \\
\hline
-10 \\
5 \\
-2 \\
0 \end{array} \right]\]
类似地,我们可以求得哈尔小波变换的“逆变换矩阵”为下式左边的大矩阵。
\[\left[ \begin{array}{cccc|cccc}
1 & 0 & 0 & 0 & 1 & 0 & 0 & 0 \\
1 & 0 & 0 & 0 & -1 & 0 & 0 & 0 \\
0 & 1 & 0 & 0 & 0 & 1 & 0 & 0 \\
0 & 1 & 0 & 0 & 0 & -1 & 0 & 0 \\
0 & 0 & 1 & 0 & 0 & 0 & 1 & 0 \\
0 & 0 & 1 & 0 & 0 & 0 & -1 & 0 \\
0 & 0 & 0 & 1 & 0 & 0 & 0 & 1 \\
0 & 0 & 0 & 1 & 0 & 0 & 0 & -1 \\
\end{array} \right] \left[ \begin{array}{c}
210 \\
145 \\
98 \\
100 \\
\hline
-10 \\
5 \\
-2 \\
0 \end{array} \right]= \left[ \begin{array}{c}
200 \\
220 \\
150 \\
140 \\
\hline
96 \\
100 \\
100 \\
100 \end{array} \right]\]
说明:在正式定义哈尔离散小波变换时,一般需要把变换矩阵和逆变换矩阵进行 “规范正交化” 。
参考:
Image Compression: How Math Led to the JPEG2000 Standard, Haar Wavelet Transformation
Building Our Wavelet Transform - Examples
2.2.2. 一维离散哈尔小波变换
把前面介绍例子中的变换矩阵和逆变换矩阵进行规范正交化,并推广到一般情况,可以得到离散哈尔小波变换的正式定义。
假设 \(N\) 是偶数,则一维离散哈尔小波变换(Discrete Haar Wavelet Transformation)定义为下面矩阵对应的变换:
\[W_N = \left[ \begin{array}{c}
H_{N/2} \\
\hline
G_{N/2} \end{array} \right] \left[ \begin{array}{ccccccc}
\sqrt{2}/2 & \sqrt{2}/2 & 0 & 0 & \cdots & 0 & 0 \\
0 & 0 & \sqrt{2}/2 & \sqrt{2}/2 & & 0 & 0 \\
\vdots & & & & \ddots & & \vdots \\
0 & 0 & 0 & 0 & \cdots & \sqrt{2}/2 & \sqrt{2}/2 \\
\hline
\sqrt{2}/2 & -\sqrt{2}/2 & 0 & 0 & \cdots & 0 & 0 \\
0 & 0 & \sqrt{2}/2 & -\sqrt{2}/2 & & 0 & 0 \\
\vdots & & & & \ddots & & \vdots \\
0 & 0 & 0 & 0 & \cdots & \sqrt{2}/2 & -\sqrt{2}/2 \\
\end{array} \right]\]
其中, \(\frac{N}{2} \times N\) 块 \(H_{N/2}\) 称为 均值块(averages block) , \(\frac{N}{2} \times N\) 块 \(G_{N/2}\) 称为 细节块(details block) 。由于离散哈尔小波变换的变换是正交矩阵,所以它的“逆变换矩阵”等于它的转置矩阵,即 \(W_N^{-1} = W_N^{\mathsf{T}}\) 。
为什么 \(H_{N/2}\) 被称为“均值块”这个名字呢?把它和一个向量相乘(如 \(\boldsymbol{a}\) )即可看出原因。
\[\begin{aligned} H_{\frac{N}{2} \times N} \boldsymbol{a}_{N \times 1} & = \left[ \begin{array}{ccccccc}
\sqrt{2}/2 & \sqrt{2}/2 & 0 & 0 & \cdots & 0 & 0 \\
0 & 0 & \sqrt{2}/2 & \sqrt{2}/2 & & 0 & 0 \\
\vdots & & & & \ddots & & \vdots \\
0 & 0 & 0 & 0 & \cdots & \sqrt{2}/2 & \sqrt{2}/2 \\
\end{array} \right] \begin{bmatrix} a_0 \\
a_1 \\
\vdots \\
a_{N-2} \\
a_{N-1} \end{bmatrix} \\
& = \sqrt{2} \begin{bmatrix} \frac{a_0 + a_1}{2} \\
\frac{a_2 + a_3}{2} \\
\vdots \\
\frac{a_{N-2} + a_{N-1}}{2} \end{bmatrix} \\
\end{aligned}\]
所以, \(H_{N/2}\) 的作用是计算每两个连续值的“平均值”,再乘以一个系数 \(\sqrt{2}\) ,故把 \(H_{N/2}\) 被称为“均值块”。
2.2.3. 二维离散哈尔小波变换
设 \(A\) 为 \(M \times N\) 矩阵(其中 \(M\) 和 \(N\) 都是偶数)。则 \(W_M A\) 相当于对 \(A\) 的“每一列”应用一维离散哈尔小波变换。下面是一个简单例子,假设 \(A_{4 \times 2}\) 为下面矩阵:
\[A = \begin{bmatrix} 10 & 16 \\
2 & 24 \\
9 & 10 \\
5 & 10 \\
\end{bmatrix}\]
从而有:
\[W_4 A = \sqrt{2} \left[ \begin{array}{cccc} 1/2 & 1/2 & 0 & 0 \\
0 & 0 & 1/2 & 1/2 \\
\hline
1/2 & -1/2 & 0 & 0 \\
0 & 0 & 1/2 & -1/2 \\
\end{array} \right] \begin{bmatrix} 10 & 16 \\
2 & 24 \\
9 & 10 \\
5 & 10 \\
\end{bmatrix} = \sqrt{2} \left[ \begin{array}{ccc} 6 & 20 \\
7 & 10 \\
\hline
4 & -4 \\
2 & 0 \\
\end{array} \right]\]
如果把 \(A\) 看作是灰度图像,如图 5 所示。
Figure 5: 一个灰度图像 \(A\)
则进行 \(W_M A\) 变换后,得到的图像如图 6 所示,其上半部分是对列每连续两像素取均值的图像,下半部分是每列连续两像素取差值的图像。
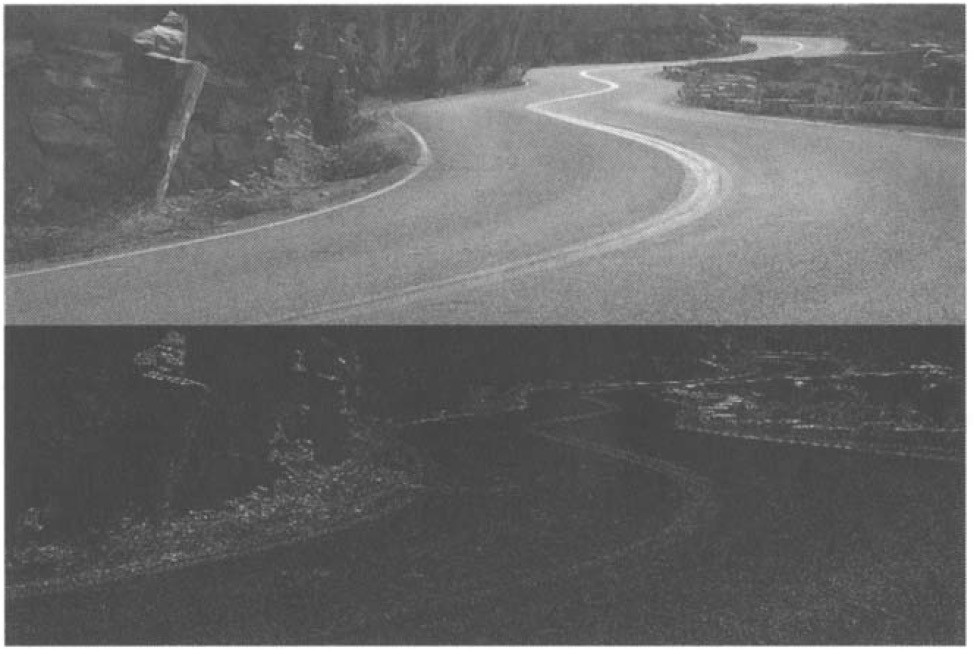
Figure 6: \(W_M A\) 相当于对灰度图像 \(A\) 每列应用离散哈尔小波变换
类似地, \(A W_N^{\mathsf{T}}\) 相当于对灰度图像 \(A\) 每行应用离散哈尔小波变换,如图 7 所示,其左半部分是对行每连续两像素取均值的图像,右半部分是每行连续两像素取差值的图像。
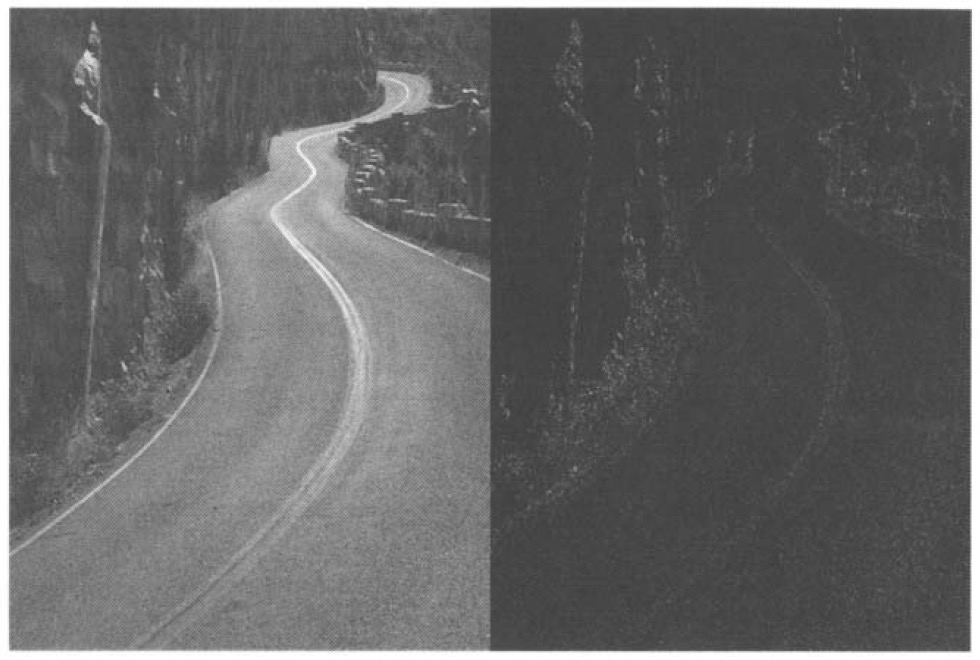
Figure 7: \(A W_N^{\mathsf{T}}\) 相当于对灰度图像 \(A\) 每行应用离散哈尔小波变换
一般地,处理时会同时对图像的列和行应用离散哈尔小波变换,如图 8 所示。这就是二维离散哈尔小波变换。
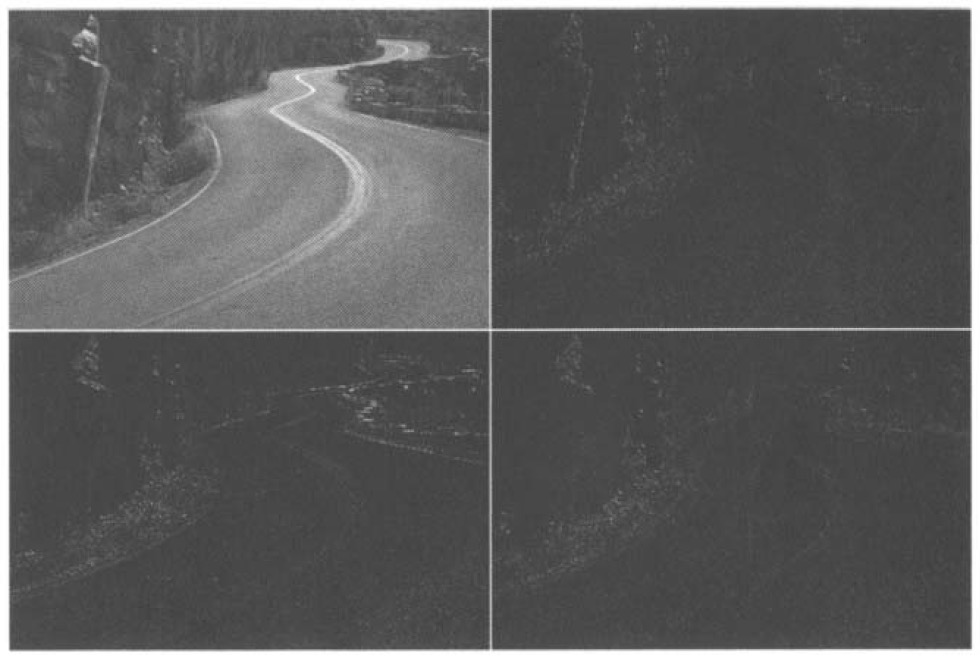
Figure 8: \(W_M A W_N^{\mathsf{T}}\) 相当于同时对图像 \(A\) 的列和行应用离散哈尔小波变换
矩阵 \(A_{M \times N}\) (其中 \(M\) 和 \(N\) 都是偶数)的二维离散哈尔小波变换的定义为:
\[B = W_M A W_N^{\mathsf{T}}\]
其中, \(W_M\) 和 \(W_N\) 就是前面介绍一维离散哈尔小波时的变换矩阵。
2.2.3.1. 二维离散哈尔小波变换的进一步分析
由前面的定义知, \(A\) 的二维离散哈尔小波变换为:
\[\begin{aligned} B &= W_M A W_N^{\mathsf{T}} \\
& = \left[ \begin{array}{c}
H_{M/2} \\
\hline
G_{M/2} \end{array} \right] \cdot A \cdot \left[ \begin{array}{c}
H_{N/2} \\
\hline
G_{N/2} \end{array} \right]^{\mathsf{T}} \\
& = \left[ \begin{array}{c}
H_{M/2} \\
\hline
G_{M/2} \end{array} \right] \cdot A \cdot \left[ \begin{array}{c|c}
H_{N/2}^{\mathsf{T}} & G_{N/2}^{\mathsf{T}} \end{array} \right] \\
& = \left[ \begin{array}{c}
H_{M/2} A \\
\hline
G_{M/2} A \end{array} \right] \cdot \left[ \begin{array}{c|c}
H_{N/2}^{\mathsf{T}} & G_{N/2}^{\mathsf{T}} \end{array} \right] \\
& = \left[ \begin{array}{c|c}
H_{M/2} A H_{M/2}^{\mathsf{T}} & H_{N/2} A G_{N/2}^{\mathsf{T}} \\
\hline
G_{M/2} A H_{N/2}^{\mathsf{T}} & G_{M/2} A G_{N/2}^{\mathsf{T}} \\
\end{array} \right] \\
& = \left[ \begin{array}{c|c} \mathcal{A} & \mathcal{V} \\
\hline
\mathcal{H} & \mathcal{D} \\
\end{array} \right] \\
\end{aligned}\]
\(A\) 的元素记为 \(a_{i,j}\) ,且记 \(\alpha_{ij}, \beta_{ij}, \gamma_{ij}, \delta_{ij}\) 分别为矩阵 \(\mathcal{A}, \mathcal{V}, \mathcal{H}, \mathcal{D}\) 的元素。通过仔细推导(略),可得:
\[\begin{aligned} \alpha_{ij} &= 2 \cdot \frac{a_{2i-1,2j-1} + a_{2i-1,2j} + a_{2i,2j-1} + a_{2i,2j}}{4} \\
\beta_{ij} &= 2 \cdot \frac{-(a_{2i-1,2j-1} + a_{2i,2j-1}) + (a_{2i-1,2j} + a_{2i,2j})}{4} \\
\gamma_{ij} &= 2 \cdot \frac{-(a_{2i-1,2j-1} + a_{2i-1,2j}) + (a_{2i,2j-1} + a_{2i,2j})}{4} \\
\delta_{ij} &= 2 \cdot \frac{(a_{2i-1,2j-1} + a_{2i,2j}) - (a_{2i-1,2j} + a_{2i,2j-1})}{4} \\
\end{aligned}\]
从而, \(\mathcal{A}\) 是 \(A\) 的一个“近似矩阵”,而 \(\mathcal{V}\) 体现了“垂直细节”, \(\mathcal{H}\) 体现了“水平细节”, \(\mathcal{D}\) 体现了“对角细节”。
所以,二维离散哈尔小波变换又可以形象地表示为图 9 所示。
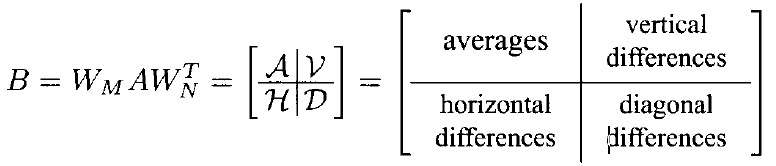
Figure 9: 二维离散哈尔小波变换
参考:
Wavelet Theory, by David K. Ruch, Patrick J. Van Fleet, 4.2 The Two-Dimensional Transform
Discrete Wavelet Transformation - An Elementary Approach with Applications, by Patrick Van Fleet, 6.3 The Two-Dimensional Haar Wavelet Transformation
http://www.whydomath.org/node/wavlets/hwt.html
2.3. 小波变换的应用
JPEG 2000 使用小波变换作为图像的“压缩”算法。小波变换也可用于图像的“边缘检测”。
边缘可以认为是图像中像素的突变,度量变化的基本数字工具是“导数”。小波变换可以得到“导数”的某种近似。
由前面介绍的内容易知,把图像进行二维小波变换后,可分解为四个部分(还可以把 \(\mathcal{A}\) 继续分解):
\[\left[ \begin{array}{c|c} \mathcal{A} & \mathcal{V} \\
\hline
\mathcal{H} & \mathcal{D} \\
\end{array} \right]\]
分解后,“变化”主要存储在 \(\mathcal{V}, \mathcal{H}, \mathcal{D}\) 子矩阵中,如果把子矩阵 \(\mathcal{A}\) 置为零,再求小波逆变换,得到的主要是差异部分的图像(即图像边缘)。这就是小波变换应用于图像的边缘检测的基本思路。